
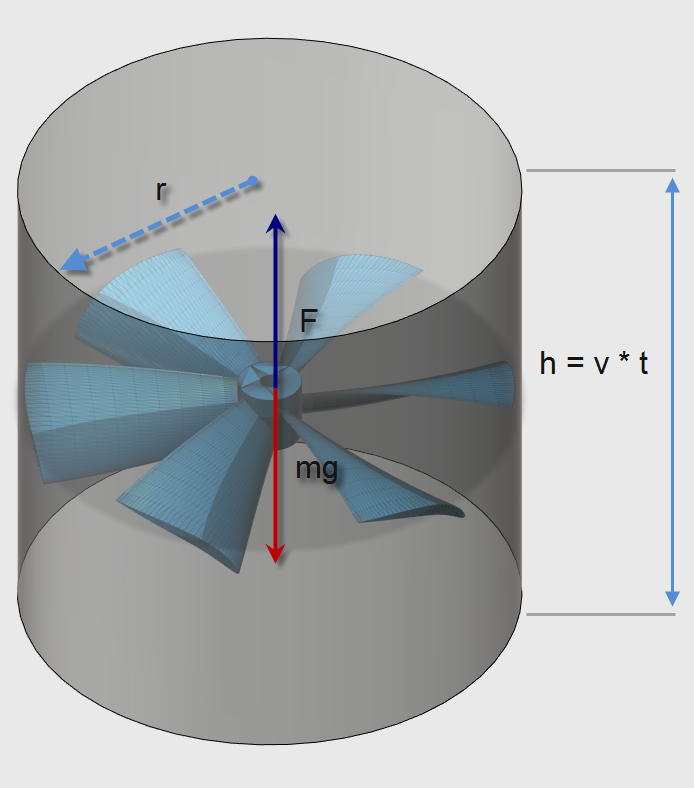
How much power is needed to hover ?
by Sergiu Baluta, Starlino Electronics, revised 10/30/2015 This article is a theoretical venture that aims to answer a series of practical questions, such as: – given a certain electrical setup …
by Sergiu Baluta, Starlino Electronics, revised 10/30/2015 This article is a theoretical venture that aims to answer a series of practical questions, such as: – given a certain electrical setup …
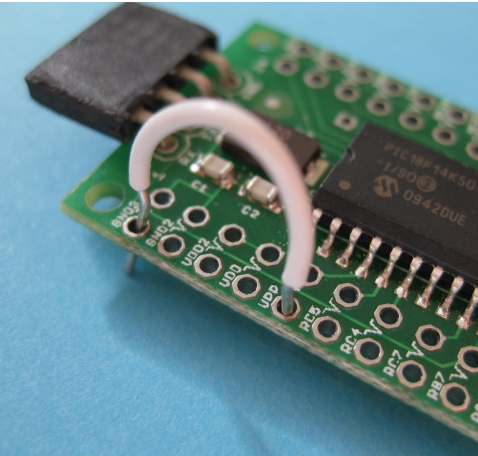
This article describes how to update firmware on USBThumb.
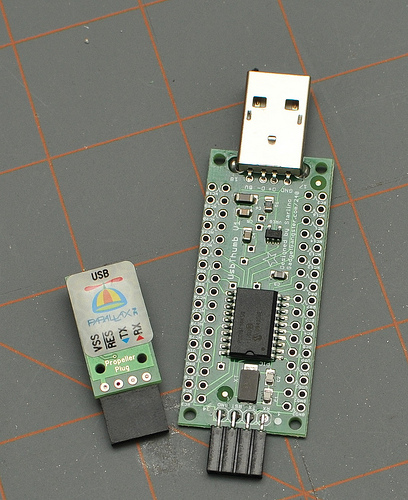
This article describes how you can use USBThumb as a Propeller Programmer or USB to Serial converter.