
My plateless Anti-vibration mounts
These 3d printed ball adapters work great! I thought that the adapter plates that come with these are too heavy so I designed and printed these white adapters, now I …
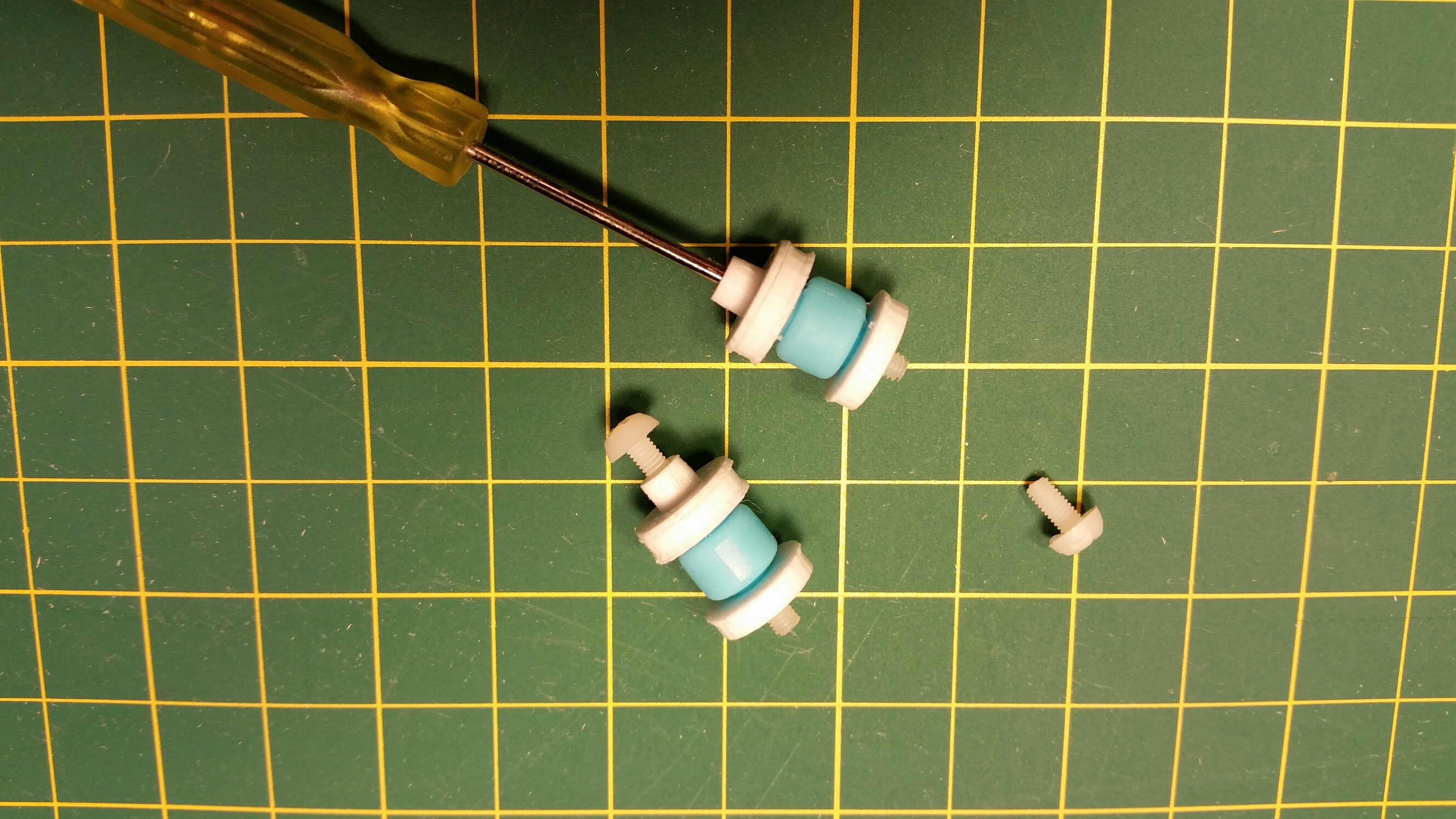
These 3d printed ball adapters work great! I thought that the adapter plates that come with these are too heavy so I designed and printed these white adapters, now I …
To all my fans, readers and supporters … I just wanted to share a new exciting project to which I dedicated my last few months of work. This project summarizes …

I recently got my first Sphero and I have to admit as with any new product I was skeptical in the beginning. However just after few minutes of playing with …
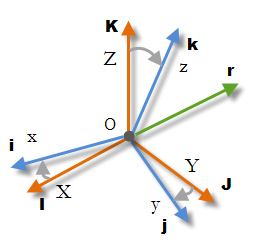
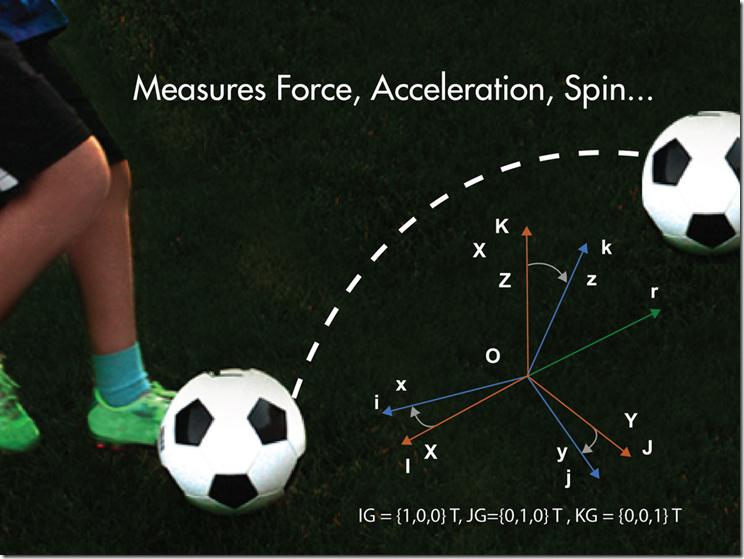
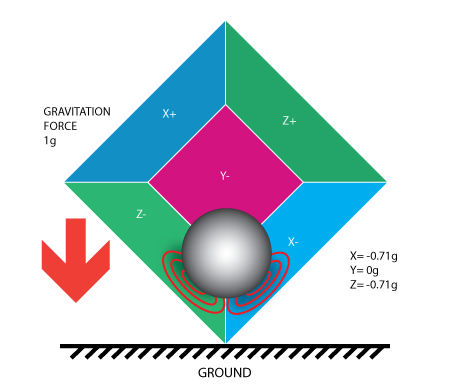
Introduction This article is a continuation of my IMU Guide, covering additional orientation kinematics topics. I will go through some theory first and then I will present a practical example …

Sign that someone from ST is reading the blogs – a series of breakout boards directly from ST , just couple of good ones: $26.95 STEVAL-MKI093V1 ( breakout for LYPR540AH …

For $99 MuSA could be a nice hackable platform for all sorts of motion-enabled applications. It has a built-in accelerometer , LCD and a simple casing. Here is the description …
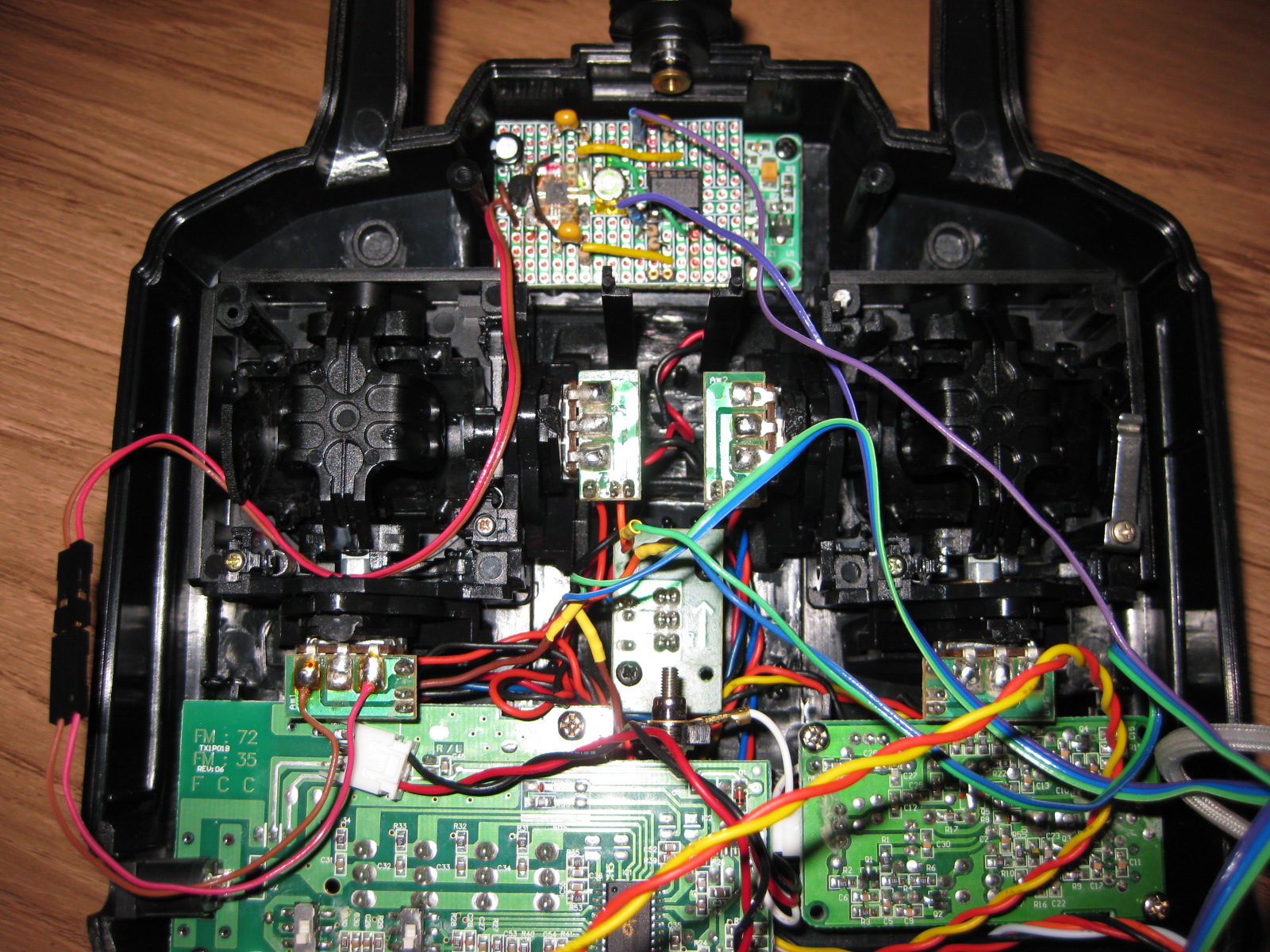
If you are into Radio Control Models or robotics chances are that you have an old RC transmitter laying around. This article describes how to create a motion control module for your RC transmitter, that will allow you to control your model or robot by simply tilting the transmitter case. That’s right no more wiggling the sticks!
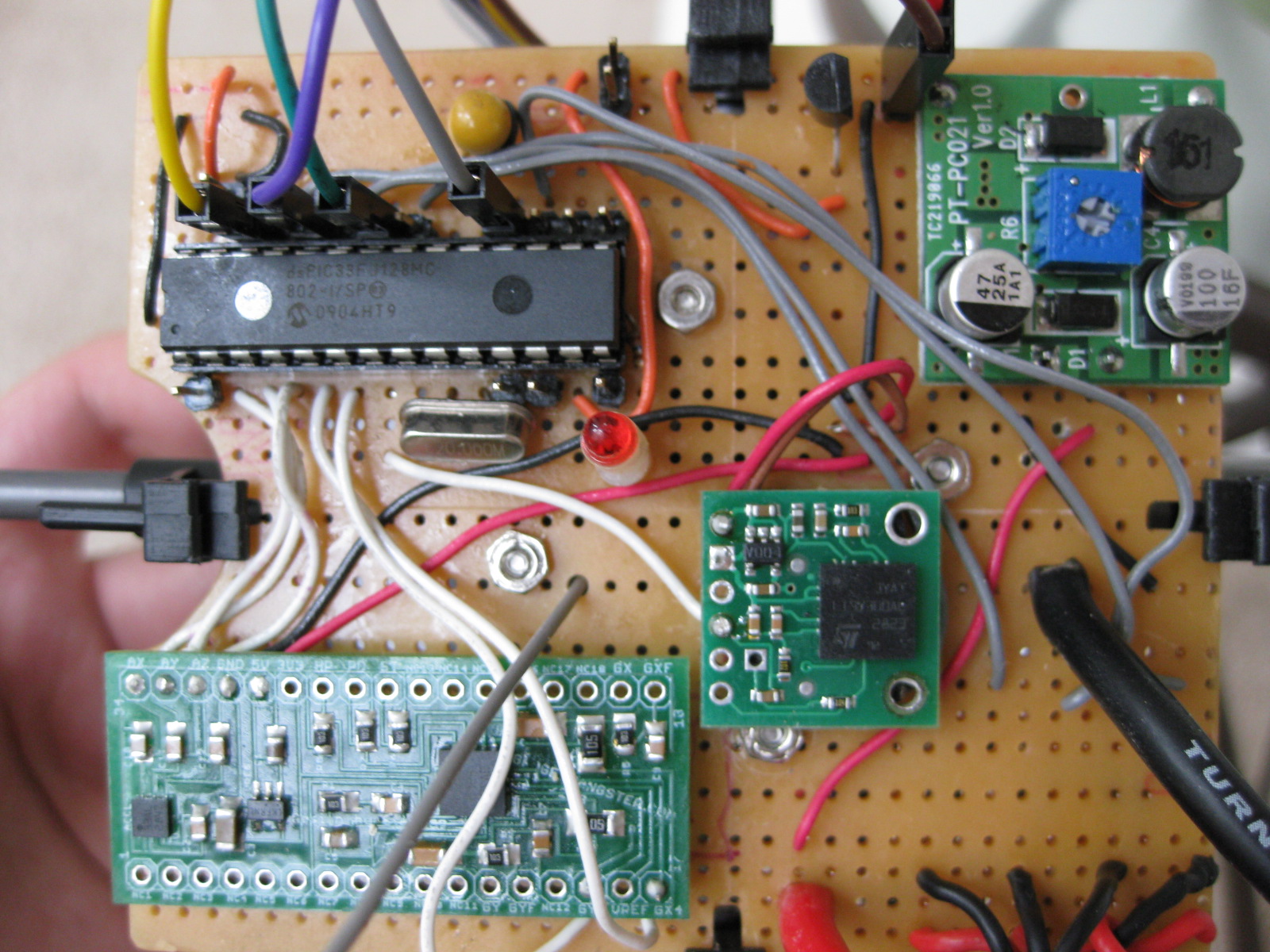
This article introduces a new project I am working on – a Quadcopter using Acc_Gyro and a PIC. I share some things I learned along the way so far.

The iPad is finally out – one feature that might caught your attention is the built-in accelerometer and the ability to control a game by tilting the device. But it turns out you can do same thing on your laptop. Read on to find out how.
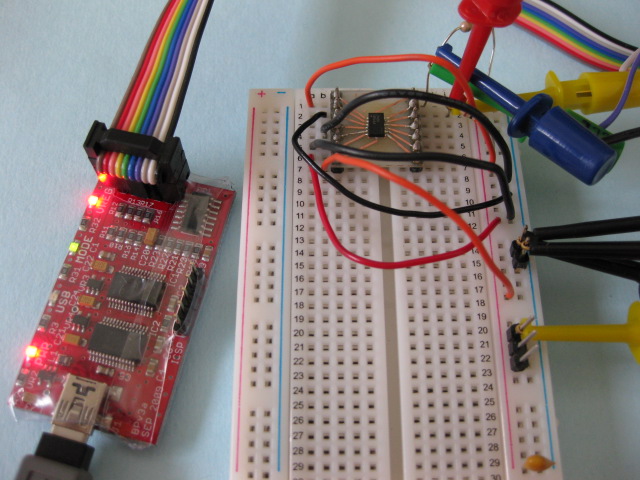
Bus Pirate is a great tool for exploring new chips using your PC , without the need to integrate the chip into a MCU project. Once I received my unit, i decided to put it to the test by exploring an accelerometer with I2C/SPI interface – the MMA7456L from Freescale. I am writing this in hope that it will help other people get started with BusPirate and I2C protocol in particular. I will only describe the I2C interface in this article but BusPirate is capable of so much more !
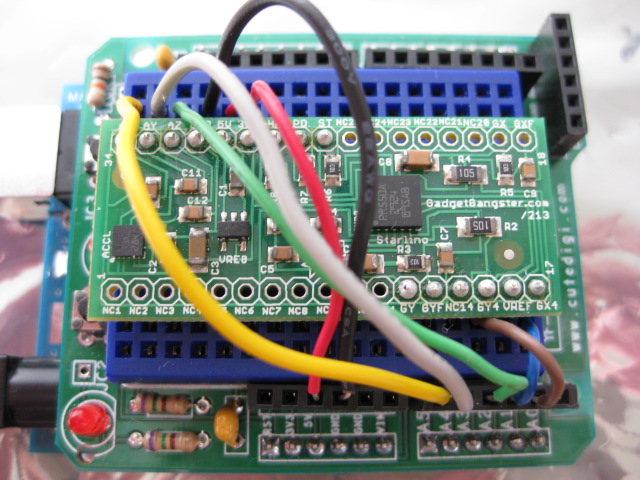
This article introduces an implementation of a simplified filtering algorithm that was inspired by Kalman filter. The Arduino code is tested using a 5DOF IMU unit from GadgetGangster – Acc_Gyro . The theory behind this algorithm was first introduced in my Imu Guide article.
This article discussed the theory behind accelerometer and gyroscope devices. It shows a simple Kalman filter alternative, that allows you to combine accelerometer and gyroscope data in order to obtain more accurate estimates about the inclination of the device relative to the ground plane.
In this article I am testing another accelerometer from ST – LIS331AL. I am also touching the topic of filters and vibration response.
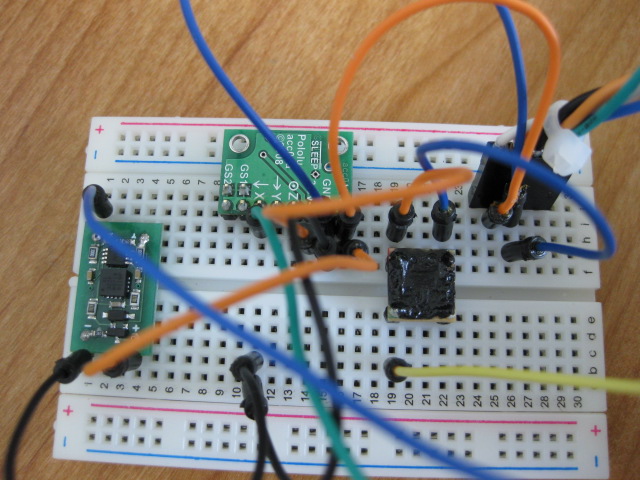
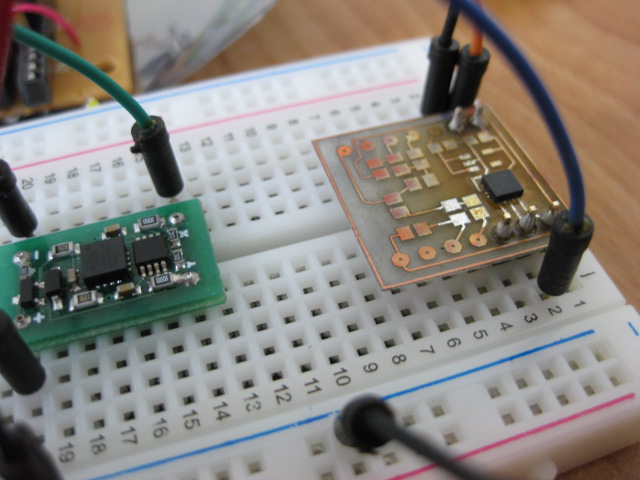
This article is the first in a series of reviews of MEMS devices (gyroscopes, accelerometers). I start by testing 3 accelerometers side by side and testing their performance: Dimension Engineering DE-ACCM2G (ADXL322), LIS244AL, Pololu MMA7260QT.
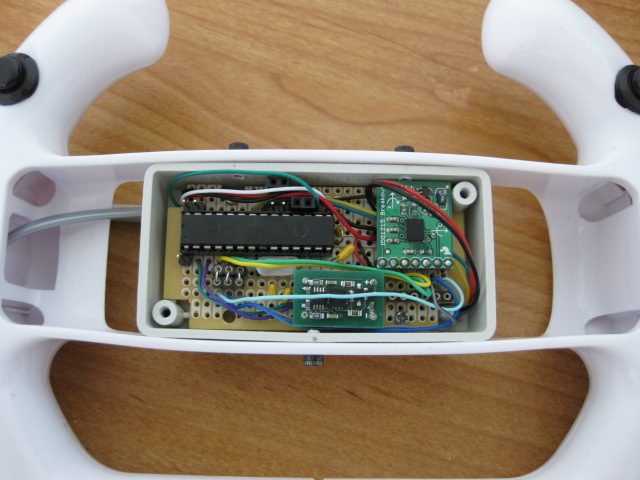
I have received some feedback from my readers regarding my first usb gamepad project , so for the past few weeks I was working on a new imrpoved design. There are plenty of new improvements that I hope will address many of your requests. The new device supports a wide range of gyroscopes and accelerometers that can be configured using Configuration Utility for Windows. Have a look at this article as it features new suggested schematics as well as a full feature log. Firmware and configuration utility are free to download for private use.

Schematics and code for construction of an accelerometer controlled USB gamepad based on a Microchip PIC microcontroller.