
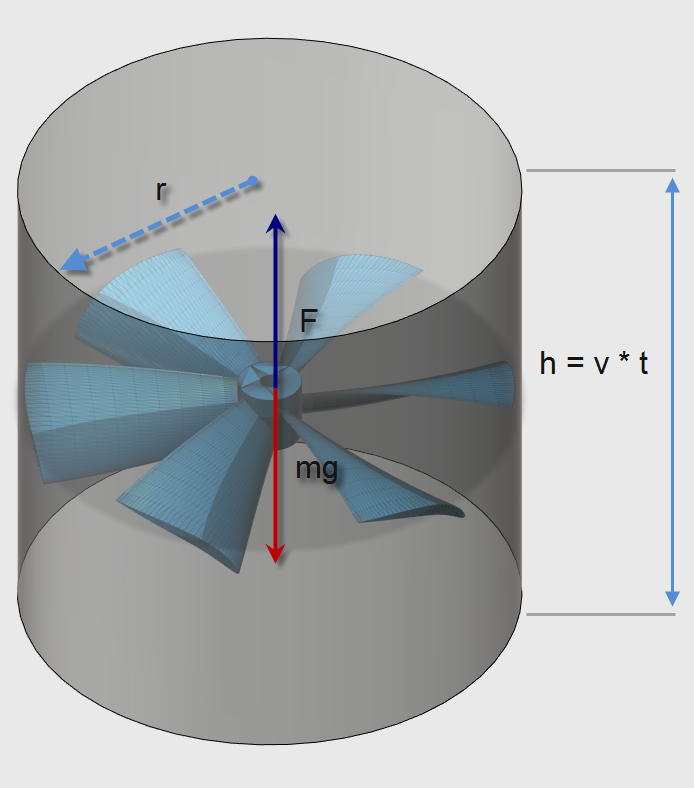
How much power is needed to hover ?
by Sergiu Baluta, Starlino Electronics, revised 10/30/2015 This article is a theoretical venture that aims to answer a series of practical questions, such as: – given a certain electrical setup …
by Sergiu Baluta, Starlino Electronics, revised 10/30/2015 This article is a theoretical venture that aims to answer a series of practical questions, such as: – given a certain electrical setup …
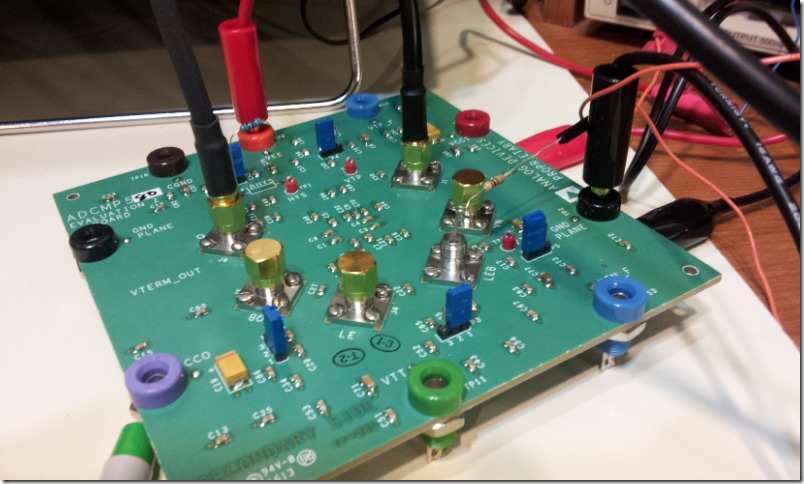
Motivation If you purchase a new or used scope you will probably need a way to test its advertised bandwidth. One way to test the bandwidth of the scope is …
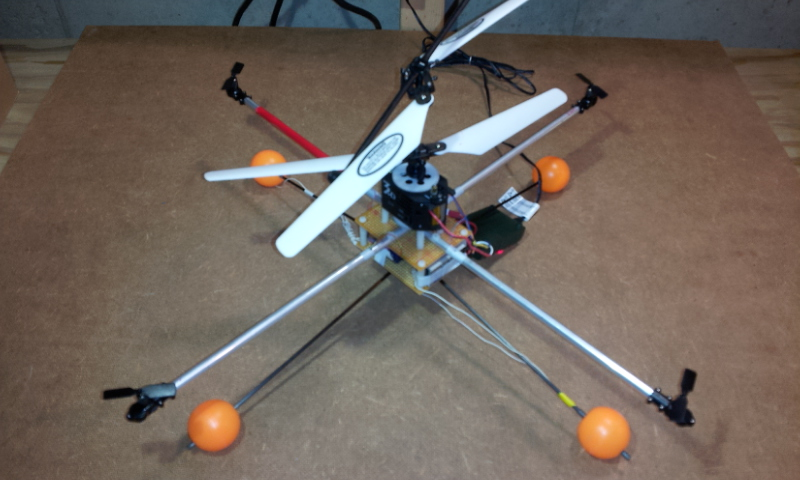
Introduction & Demo of the QuadHybrid Design I’ve been experimenting for quite a while with different configurations of Multi-Copters and RC Helicopters, basically looking for a stable robotic platform that …
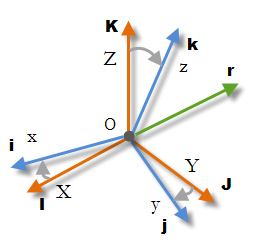
Introduction This article is a continuation of my IMU Guide, covering additional orientation kinematics topics. I will go through some theory first and then I will present a practical example …

The iPad is finally out – one feature that might caught your attention is the built-in accelerometer and the ability to control a game by tilting the device. But it turns out you can do same thing on your laptop. Read on to find out how.
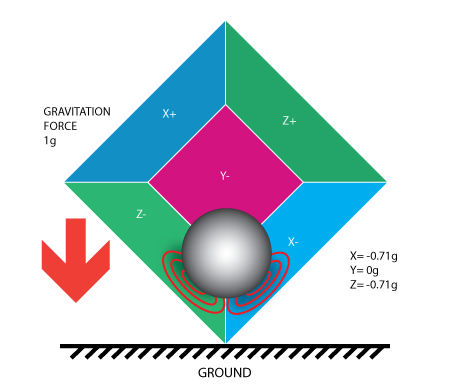
This article discussed the theory behind accelerometer and gyroscope devices. It shows a simple Kalman filter alternative, that allows you to combine accelerometer and gyroscope data in order to obtain more accurate estimates about the inclination of the device relative to the ground plane.

This projects is intended for those who would like to get started with OpenCV and stereo vision. I created a simple StereoVision C++ class that simplifies the development of a 3D calibration and vision system.