
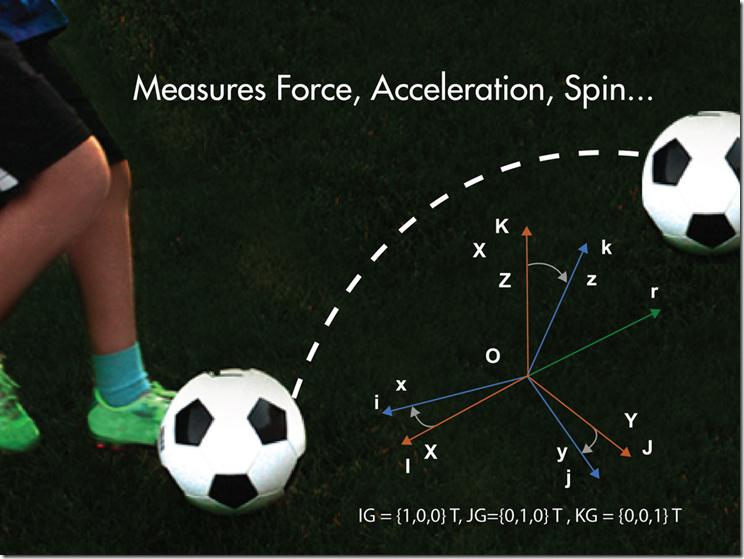
Inside Coach – Smart Ball IMU Based Technology
To all my fans, readers and supporters … I just wanted to share a new exciting project to which I dedicated my last few months of work. This project summarizes …
To all my fans, readers and supporters … I just wanted to share a new exciting project to which I dedicated my last few months of work. This project summarizes …

A terrain robotic platform must be able to handle different environments and be able to go over obstacles. While looking for such a platform for an upcoming robotic project, …
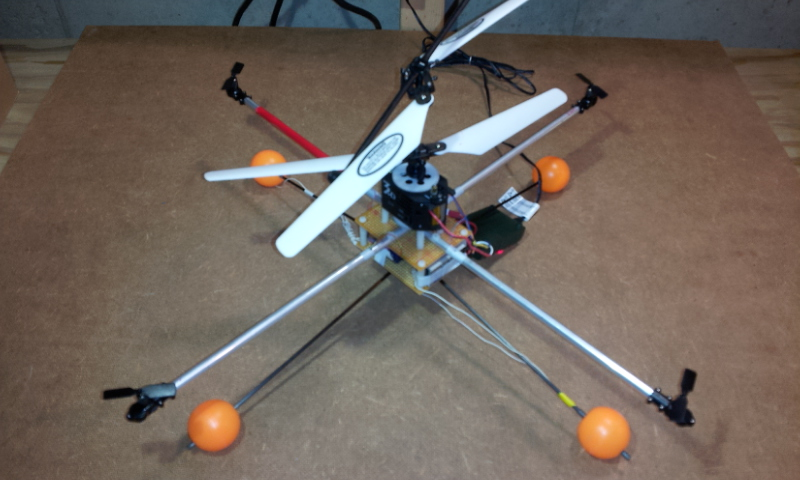
Introduction & Demo of the QuadHybrid Design I’ve been experimenting for quite a while with different configurations of Multi-Copters and RC Helicopters, basically looking for a stable robotic platform that …

Trickster is a simple application built on UsbThumb platform. It tricks your victim into thinking they have a virus on their computer, by hardware emulating and moving their mouse in circles on intermittent intervals.
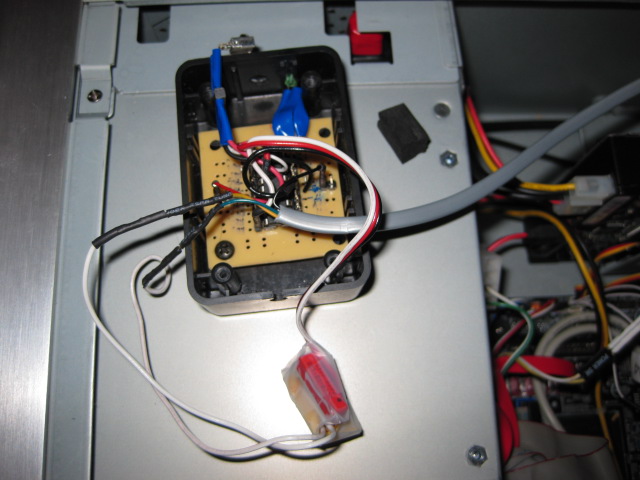
Create a device that allows you to turn on and off your computer using your regular TV remote.