
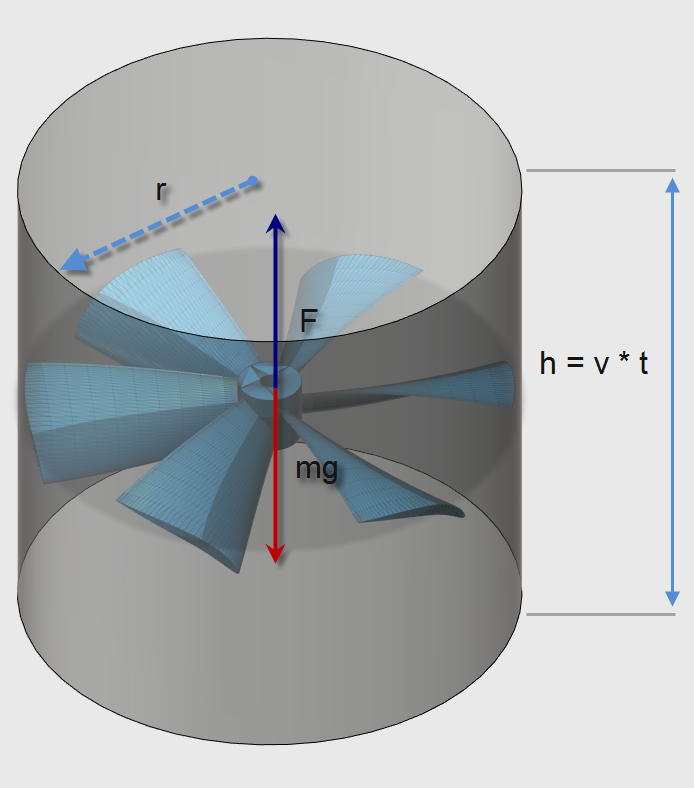
How much power is needed to hover ?
by Sergiu Baluta, Starlino Electronics, revised 10/30/2015 This article is a theoretical venture that aims to answer a series of practical questions, such as: – given a certain electrical setup …
by Sergiu Baluta, Starlino Electronics, revised 10/30/2015 This article is a theoretical venture that aims to answer a series of practical questions, such as: – given a certain electrical setup …
To all my fans, readers and supporters … I just wanted to share a new exciting project to which I dedicated my last few months of work. This project summarizes …
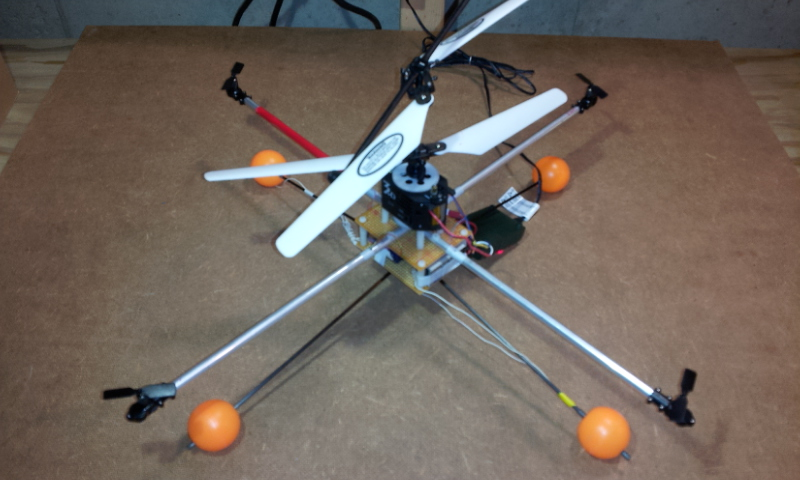
Introduction & Demo of the QuadHybrid Design I’ve been experimenting for quite a while with different configurations of Multi-Copters and RC Helicopters, basically looking for a stable robotic platform that …
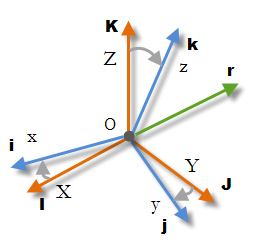
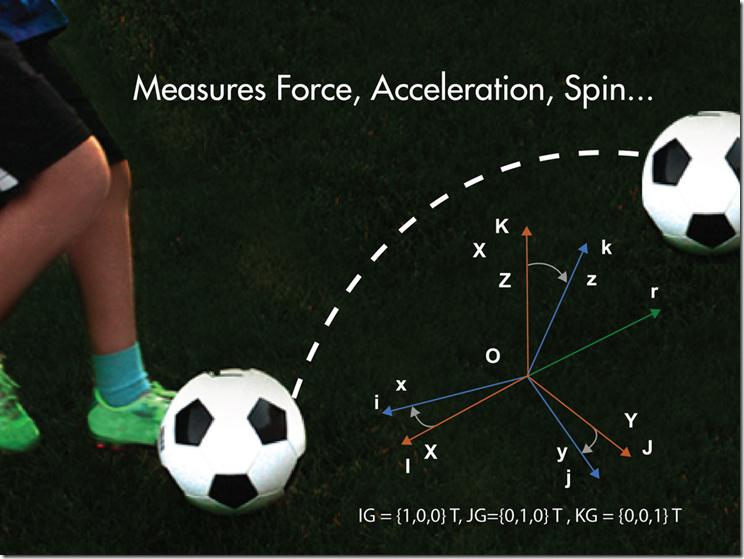
Introduction This article is a continuation of my IMU Guide, covering additional orientation kinematics topics. I will go through some theory first and then I will present a practical example …
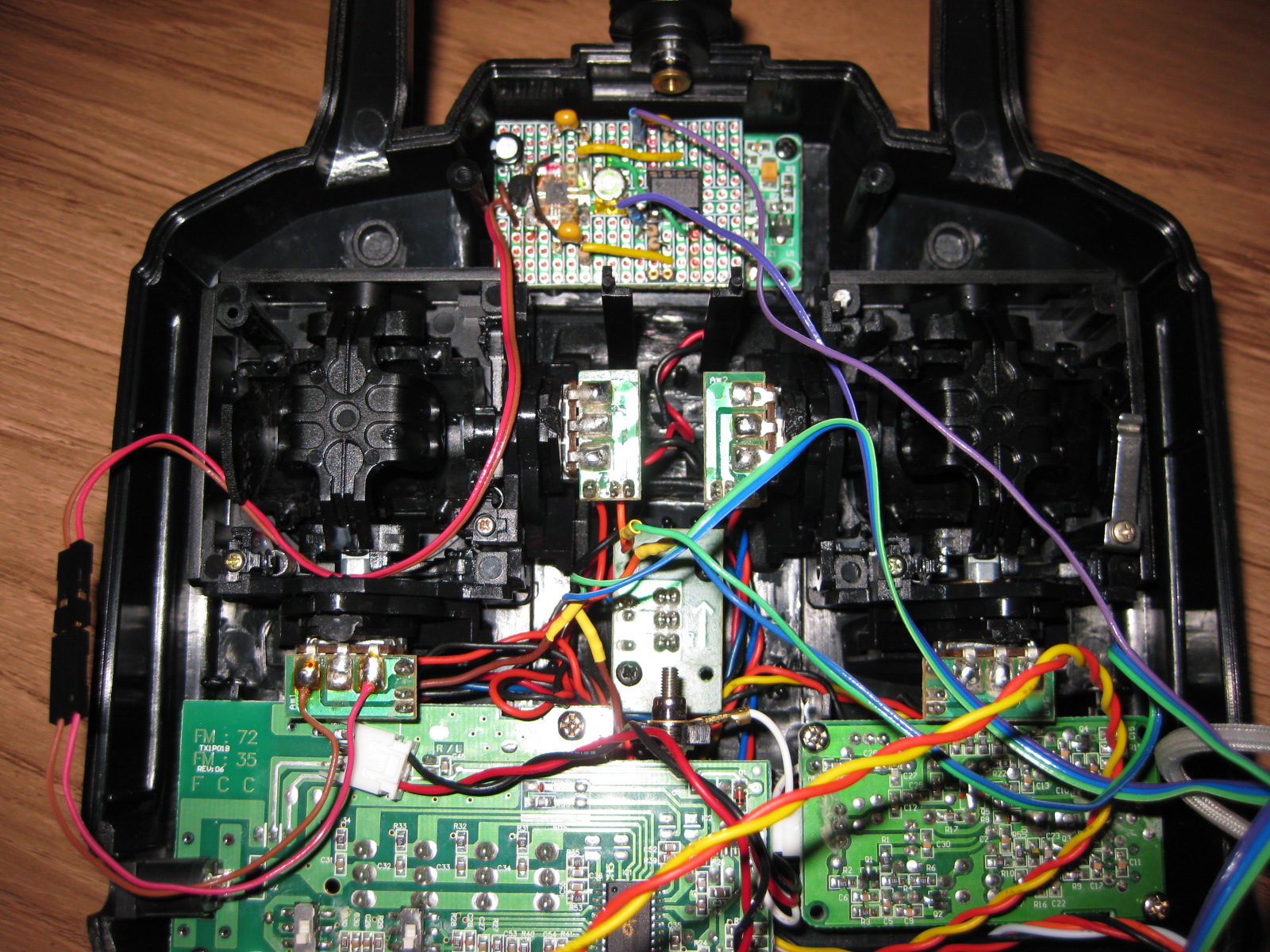
If you are into Radio Control Models or robotics chances are that you have an old RC transmitter laying around. This article describes how to create a motion control module for your RC transmitter, that will allow you to control your model or robot by simply tilting the transmitter case. That’s right no more wiggling the sticks!
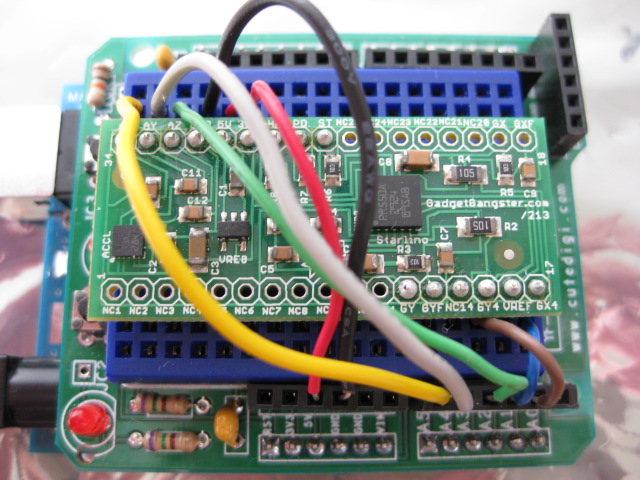
This article introduces an implementation of a simplified filtering algorithm that was inspired by Kalman filter. The Arduino code is tested using a 5DOF IMU unit from GadgetGangster – Acc_Gyro . The theory behind this algorithm was first introduced in my Imu Guide article.
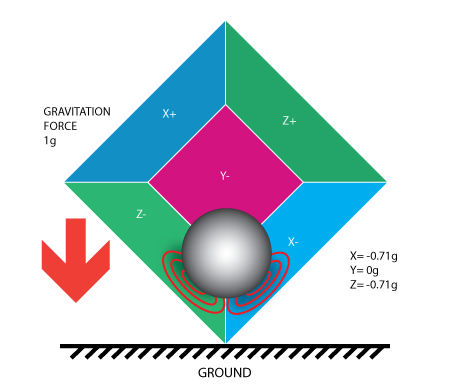
This article discussed the theory behind accelerometer and gyroscope devices. It shows a simple Kalman filter alternative, that allows you to combine accelerometer and gyroscope data in order to obtain more accurate estimates about the inclination of the device relative to the ground plane.