
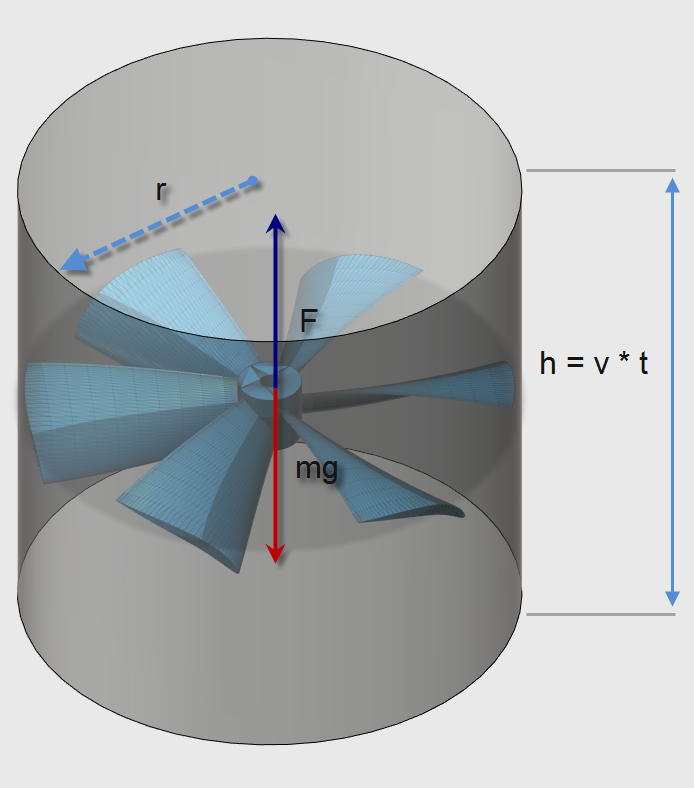
How much power is needed to hover ?
by Sergiu Baluta, Starlino Electronics, revised 10/30/2015 This article is a theoretical venture that aims to answer a series of practical questions, such as: – given a certain electrical setup …
by Sergiu Baluta, Starlino Electronics, revised 10/30/2015 This article is a theoretical venture that aims to answer a series of practical questions, such as: – given a certain electrical setup …
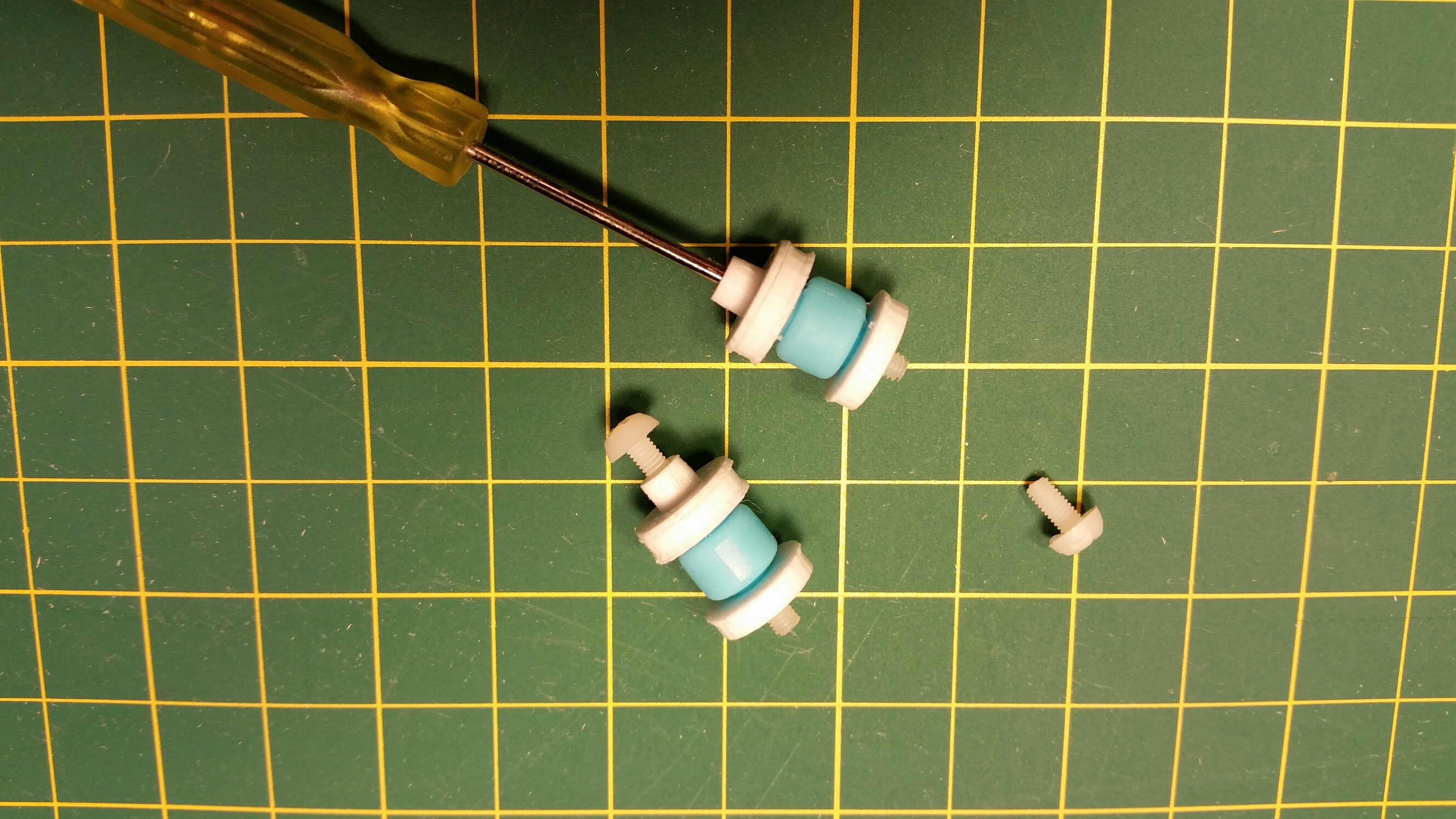
These 3d printed ball adapters work great! I thought that the adapter plates that come with these are too heavy so I designed and printed these white adapters, now I …
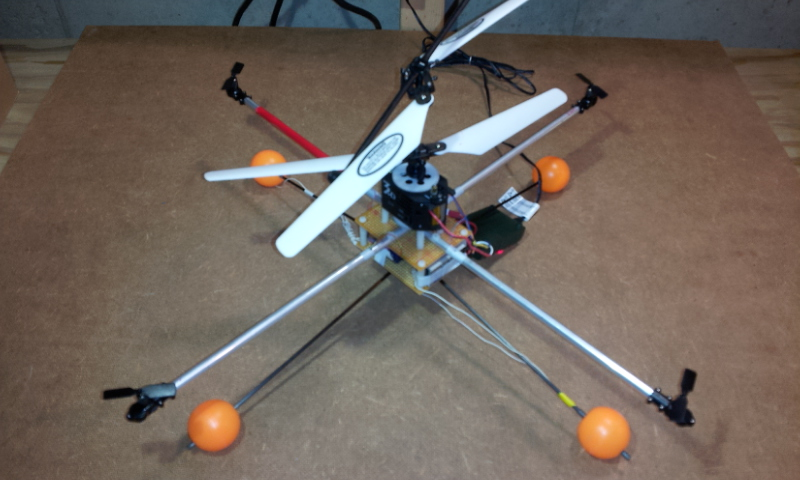
Introduction & Demo of the QuadHybrid Design I’ve been experimenting for quite a while with different configurations of Multi-Copters and RC Helicopters, basically looking for a stable robotic platform that …
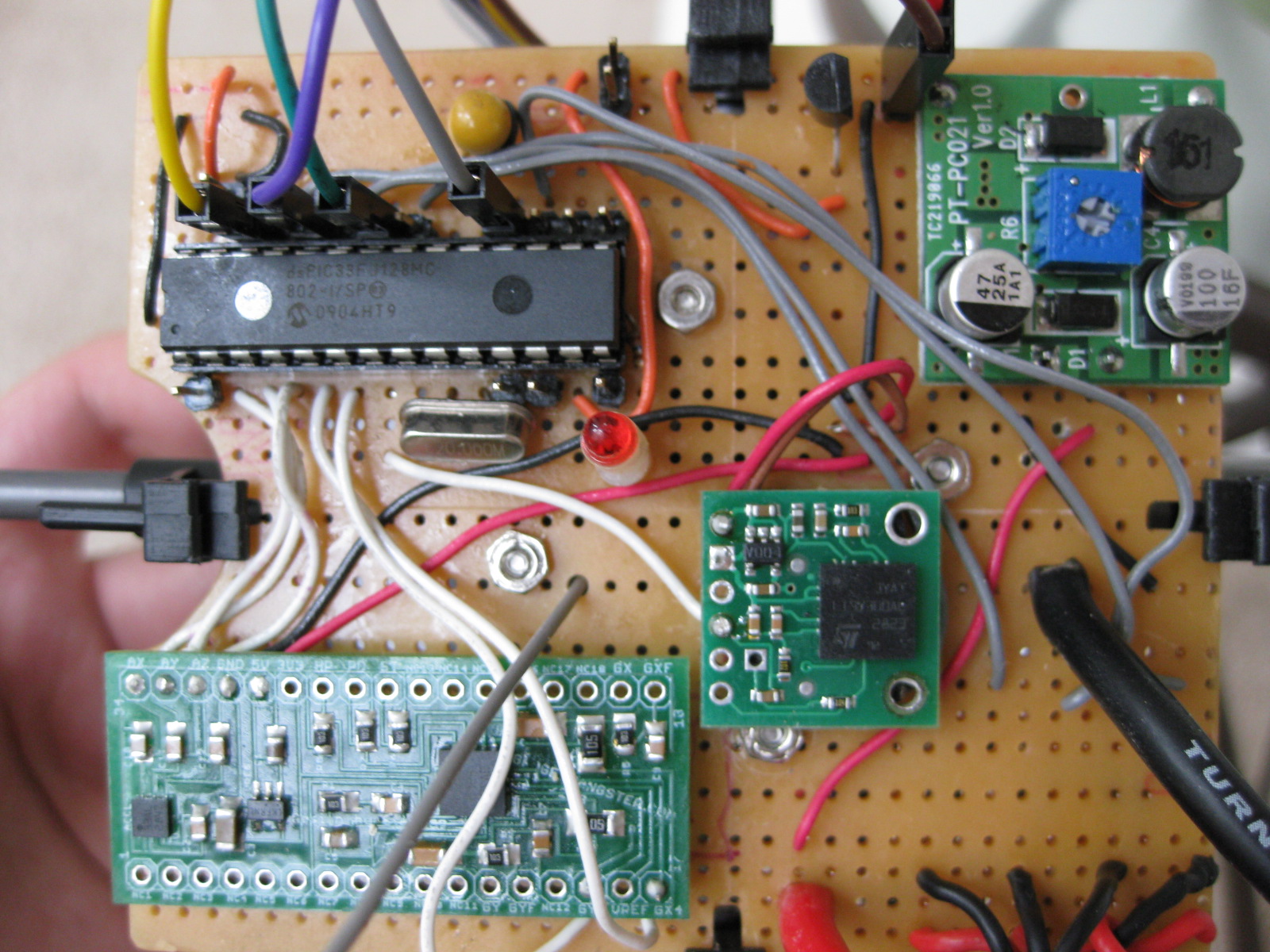
This article introduces a new project I am working on – a Quadcopter using Acc_Gyro and a PIC. I share some things I learned along the way so far.