
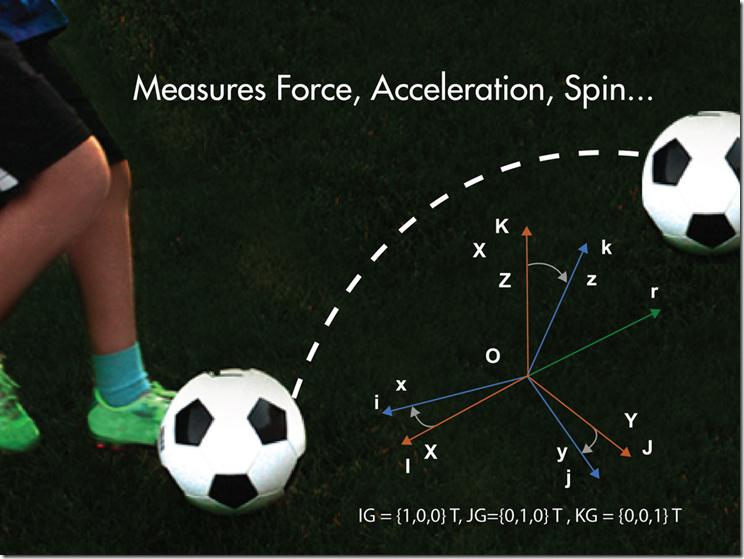
Inside Coach – Smart Ball IMU Based Technology
To all my fans, readers and supporters … I just wanted to share a new exciting project to which I dedicated my last few months of work. This project summarizes …
To all my fans, readers and supporters … I just wanted to share a new exciting project to which I dedicated my last few months of work. This project summarizes …

I recently got my first Sphero and I have to admit as with any new product I was skeptical in the beginning. However just after few minutes of playing with …
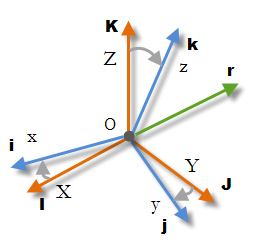
Introduction This article is a continuation of my IMU Guide, covering additional orientation kinematics topics. I will go through some theory first and then I will present a practical example …

Sign that someone from ST is reading the blogs – a series of breakout boards directly from ST , just couple of good ones: $26.95 STEVAL-MKI093V1 ( breakout for LYPR540AH …
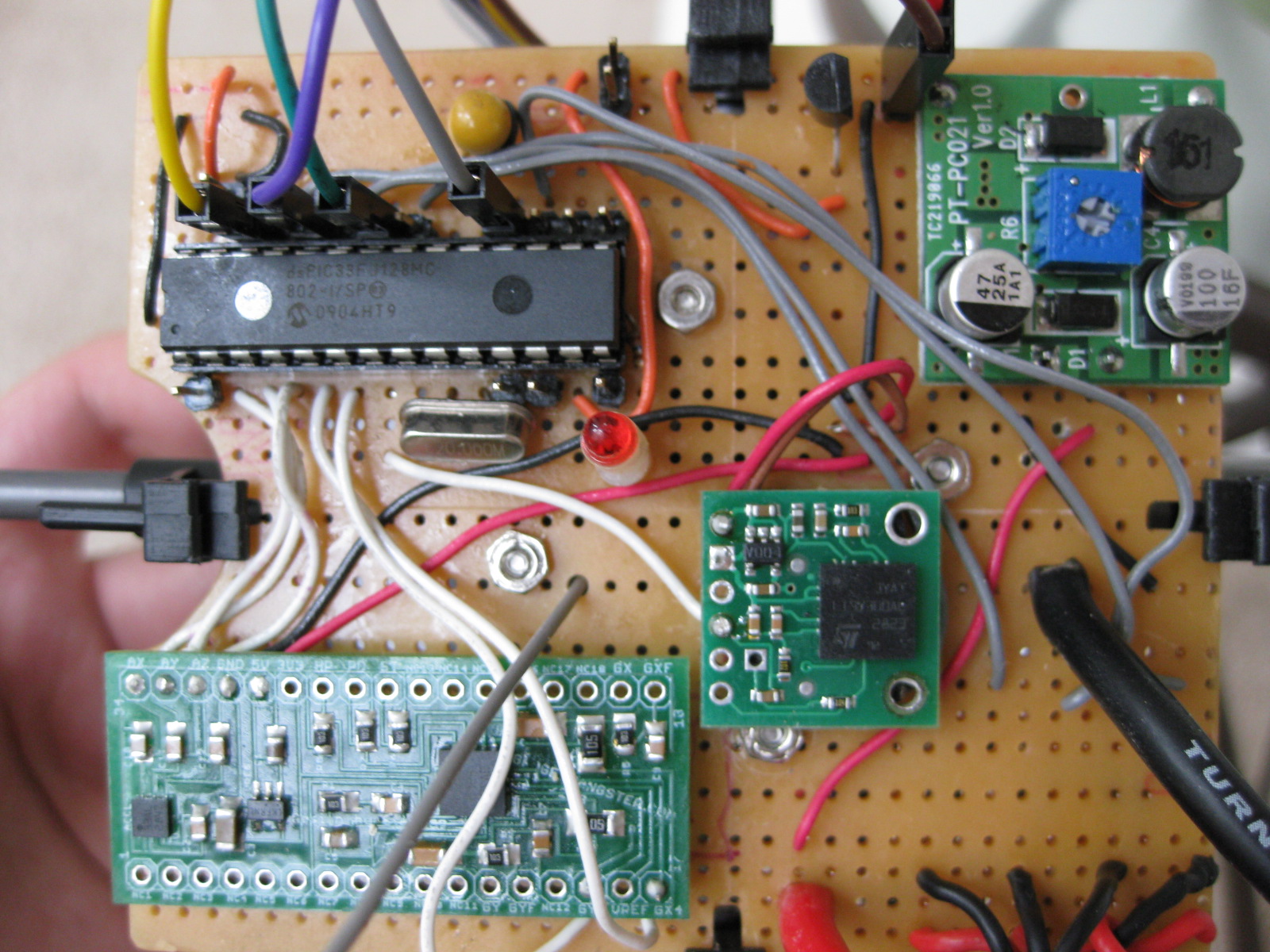
This article introduces a new project I am working on – a Quadcopter using Acc_Gyro and a PIC. I share some things I learned along the way so far.
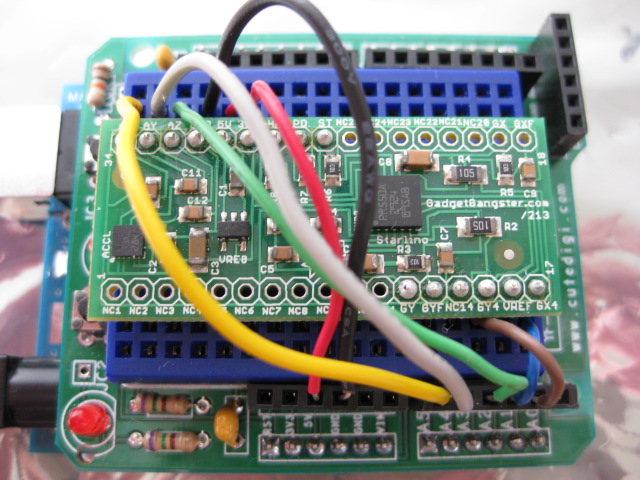
This article introduces an implementation of a simplified filtering algorithm that was inspired by Kalman filter. The Arduino code is tested using a 5DOF IMU unit from GadgetGangster – Acc_Gyro . The theory behind this algorithm was first introduced in my Imu Guide article.
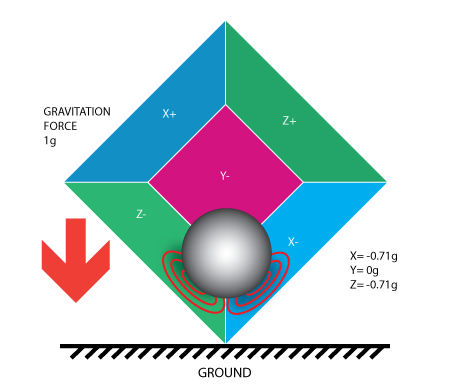
This article discussed the theory behind accelerometer and gyroscope devices. It shows a simple Kalman filter alternative, that allows you to combine accelerometer and gyroscope data in order to obtain more accurate estimates about the inclination of the device relative to the ground plane.
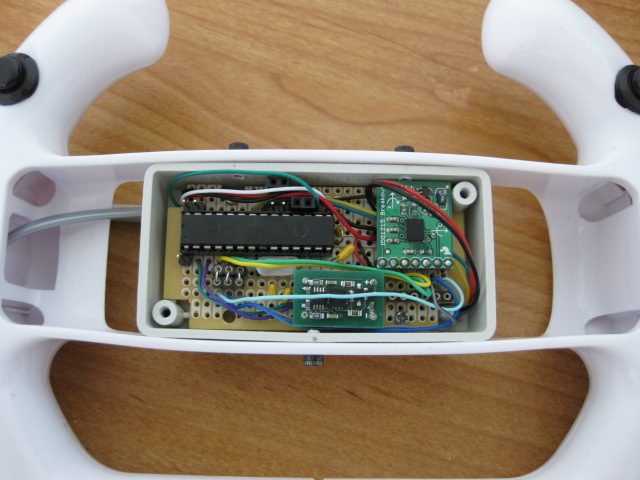
I have received some feedback from my readers regarding my first usb gamepad project , so for the past few weeks I was working on a new imrpoved design. There are plenty of new improvements that I hope will address many of your requests. The new device supports a wide range of gyroscopes and accelerometers that can be configured using Configuration Utility for Windows. Have a look at this article as it features new suggested schematics as well as a full feature log. Firmware and configuration utility are free to download for private use.