
FTDI chip real of fake ? How to spot a fake RT232R / RT232RL and others ?
Here is a 5 minute test: 1) purchase your boards in pairs this helps detect same serial number in case of fakes. Any board you buy under $5 is probably …
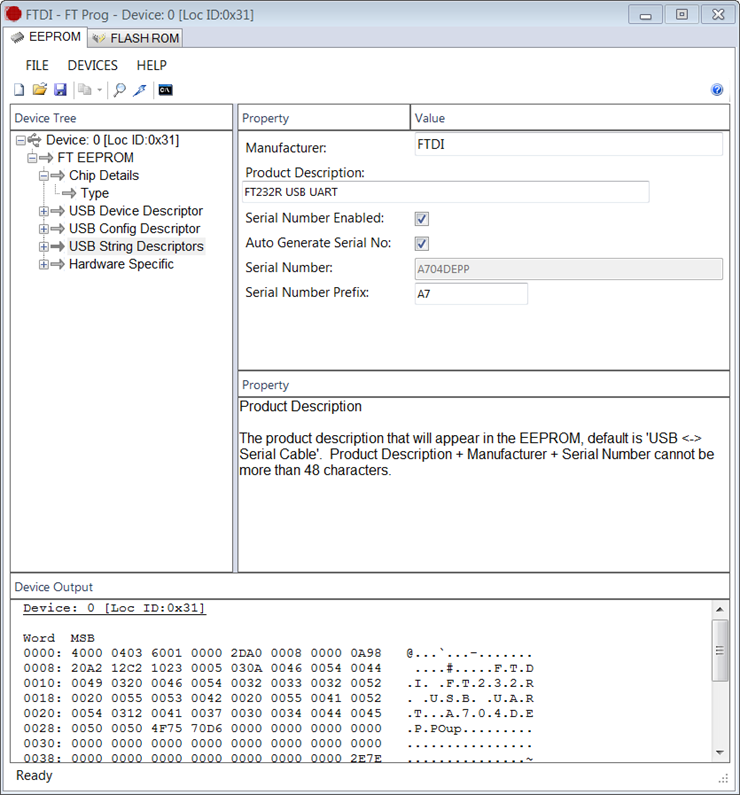
Here is a 5 minute test: 1) purchase your boards in pairs this helps detect same serial number in case of fakes. Any board you buy under $5 is probably …

Hubsan X4 is a nice quadcopter that is great for learning to fly a RC model. It is also a nice way to relax on your break since it can be …
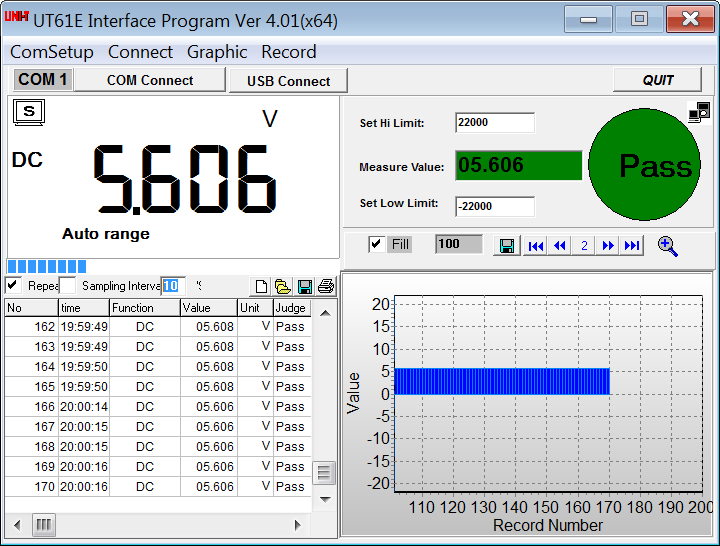
UT61E is a fantastic multimiter for the price that unfortunately comes with a terrible PC interface program: I decided to poke arround and see if I can reverse engineer the …
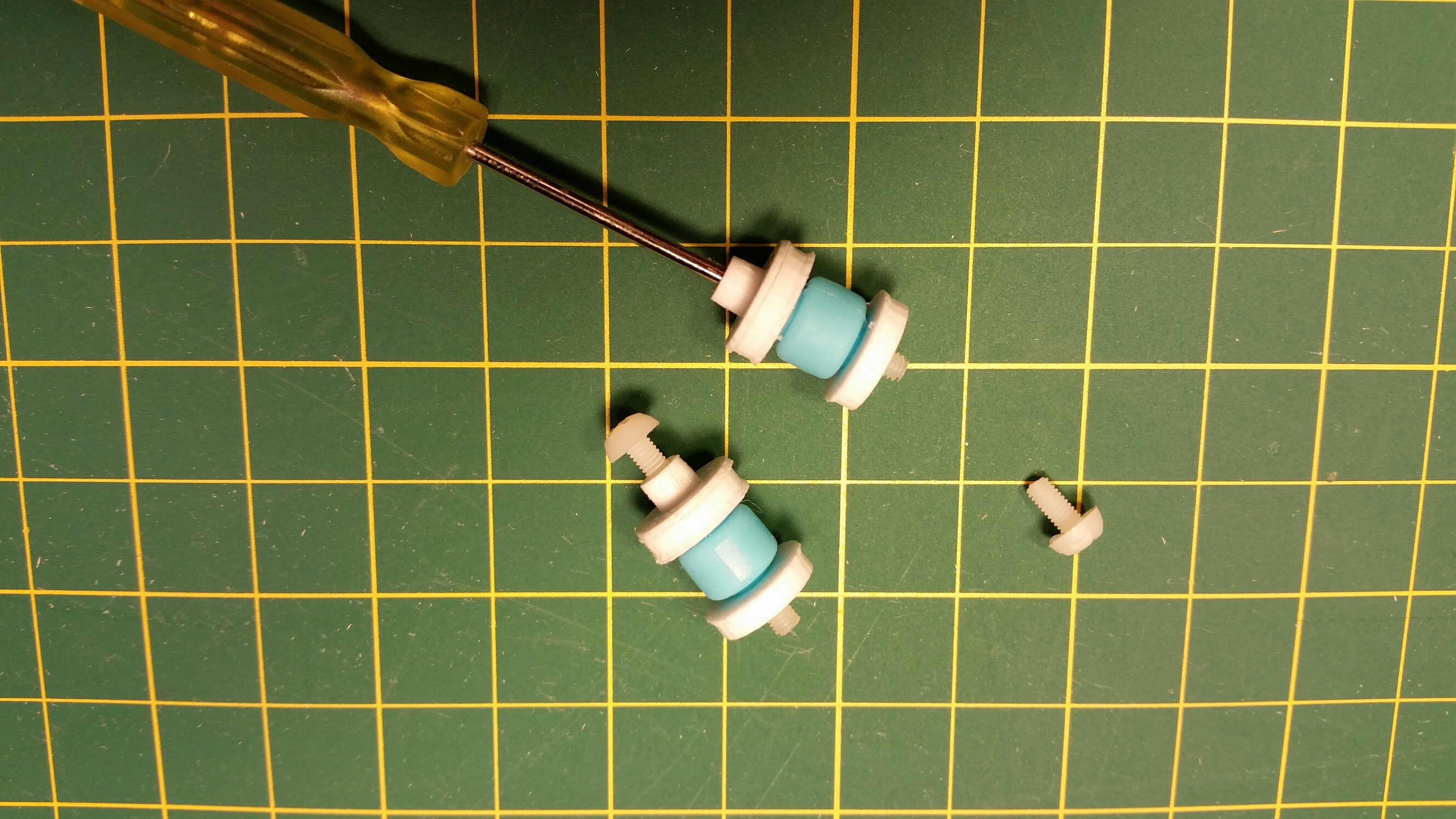
These 3d printed ball adapters work great! I thought that the adapter plates that come with these are too heavy so I designed and printed these white adapters, now I …

Here is my method of removing stubborn prints from your 3D printer’s bed. This method does minimum damage to the bed coating (painter’s tape / capton tape). All you …

A terrain robotic platform must be able to handle different environments and be able to go over obstacles. While looking for such a platform for an upcoming robotic project, …
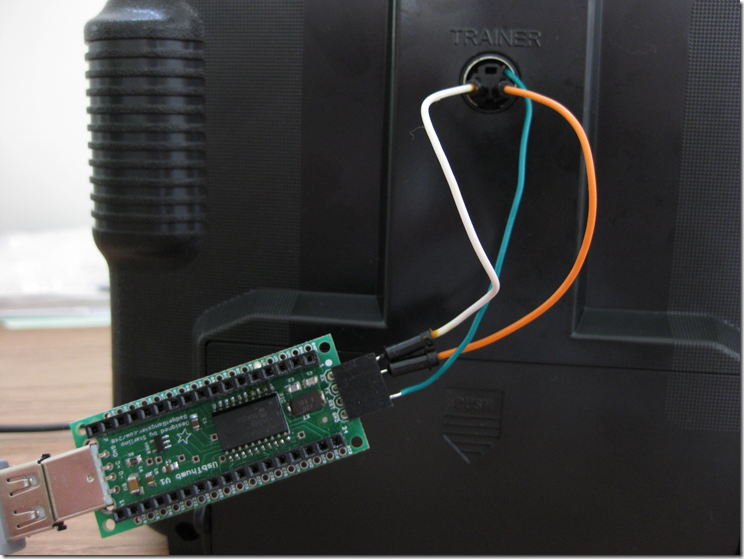
If you own a low-end RC transmitter with the Trainer port, you can program it using USBThumb (using the default USBThumbSerial firmware https://code.google.com/p/usbthumb/). The pin-out for the Trainer port is …
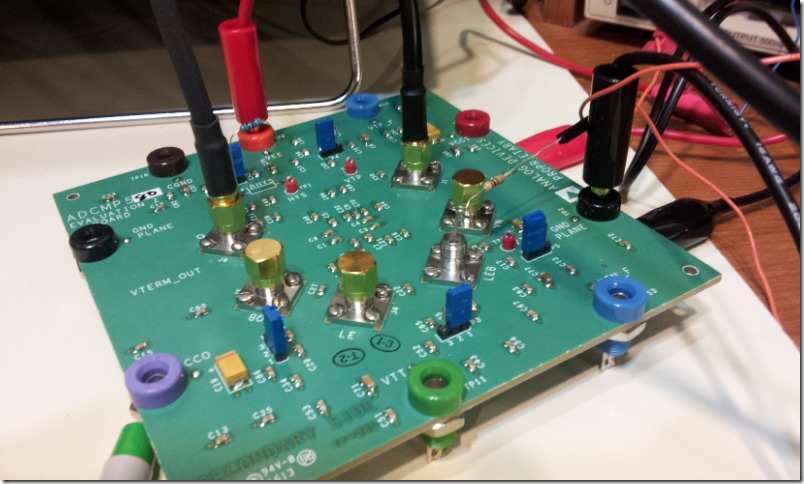
Motivation If you purchase a new or used scope you will probably need a way to test its advertised bandwidth. One way to test the bandwidth of the scope is …
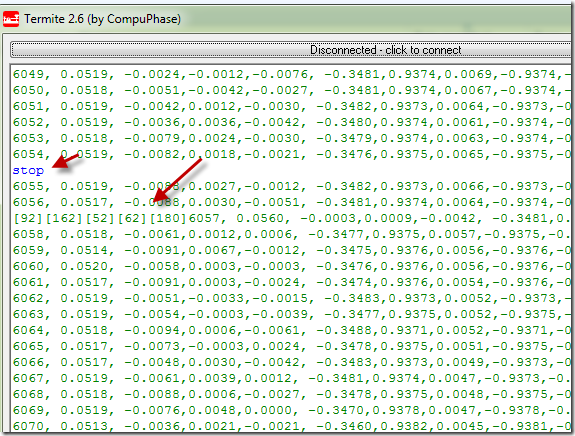
Ah, the joy of firmware debugging! I’ve been working on a USB firmware for my new upcoming product that involves a dual traditional TTL (Serial) and a USB-TO-SERIAL converter (CDC …
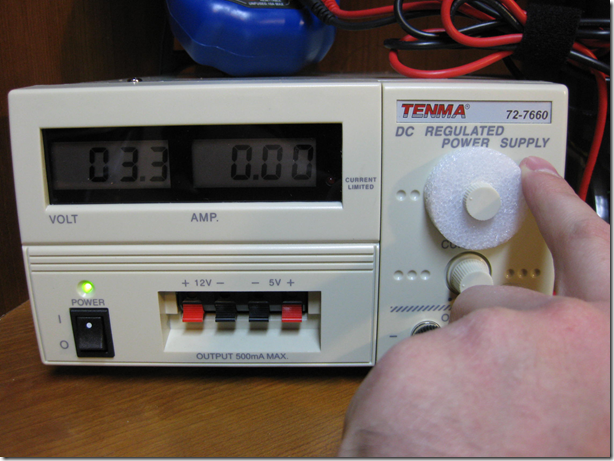
I was looking for a way to make the adjustment for my power supply more precise and easier to dial let’s say to a voltage like 3.3 , but without …
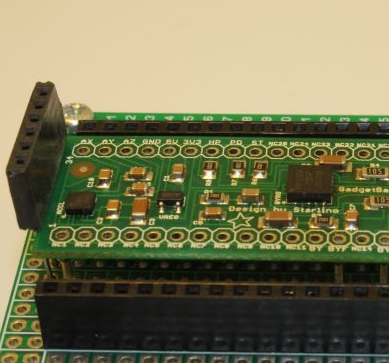
Adafruit has a nice tutorial on how to build a neat testing jig that allows you to test a breakout board without having to actually solder the header. So I …

This has been bugging me for while – I could not associate .pde files with arduino executable , I would select Open With… choose the executable but it won't work …
This article describes a series of techniques that facilitates defining and programming I/O ports in embeded C with the same ease you do these task in PBASIC/PicBasic. Macro definitions and sample code is given for PIC C18/C30 and gcc-avr (ATMEL MCUs).
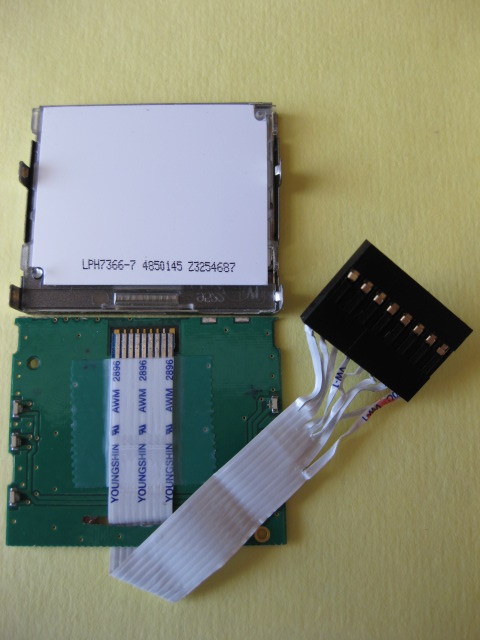
Learn how to connect a Nokia LCD to your breadboard project without soldering.