
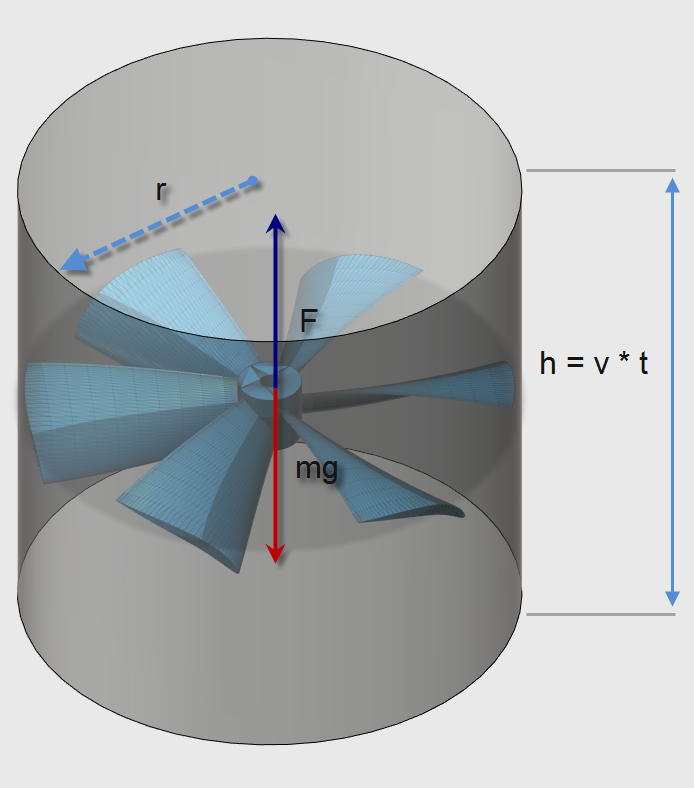
How much power is needed to hover ?
by Sergiu Baluta, Starlino Electronics, revised 10/30/2015 This article is a theoretical venture that aims to answer a series of practical questions, such as: – given a certain electrical setup …
by Sergiu Baluta, Starlino Electronics, revised 10/30/2015 This article is a theoretical venture that aims to answer a series of practical questions, such as: – given a certain electrical setup …

I recently got my first Sphero and I have to admit as with any new product I was skeptical in the beginning. However just after few minutes of playing with …
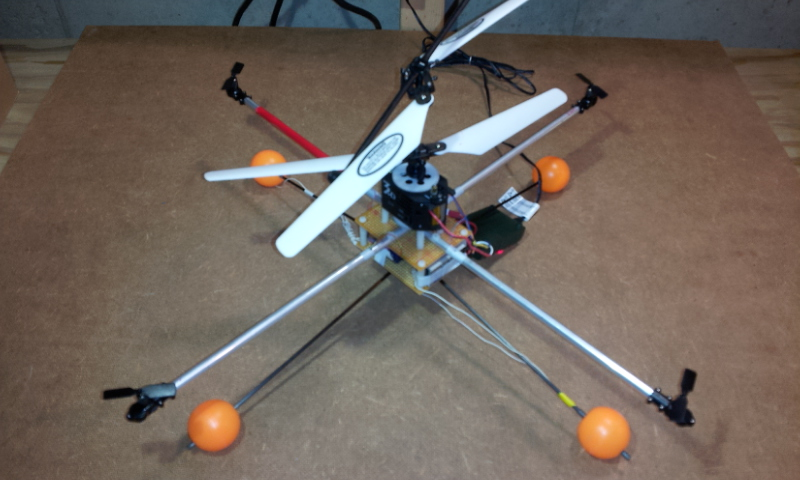
Introduction & Demo of the QuadHybrid Design I’ve been experimenting for quite a while with different configurations of Multi-Copters and RC Helicopters, basically looking for a stable robotic platform that …
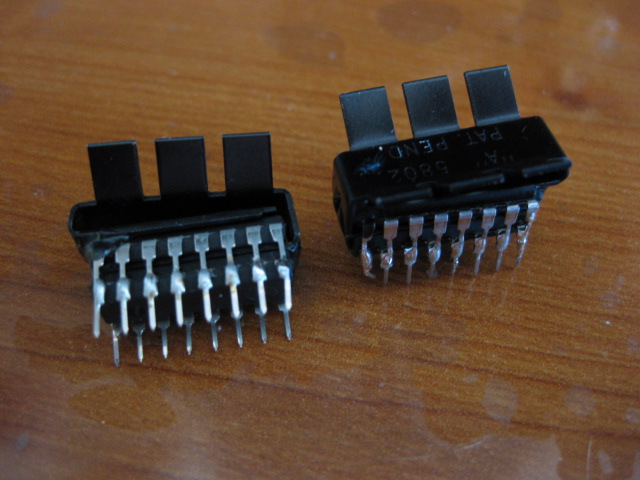
This article describes how to create an inexpensive and easy to build motor driver that can drive two DC brushed motors. The driver holds 4A per motor with 8A peak per motor. I’m including the circuit schematic and photos of a sample build on a perforated proto-board. Watch videos of motor controller in action mounted in my new wireless robot.